Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Variac Controlled Reactive Power Compensation Application
Nöbet çizelgesi için tıklayınız.
ÇARŞAMBA, xx HAZİRAN, 2004 - ASYU-2014
R - Karadeniz Teknik Üniversitesi
PDF Dosyası
Visual C#
KIRIKKALE ÜNİVERSİTESİ - K.Ü. Makine Mühendisliği Bölümü
Visual C#1
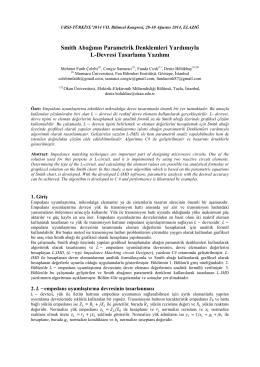
pompa satıs fıyatları lıstesı lowara pentax stream ve
10 Km - Depar Timing
Jeep ® Compass
Kvantitativna analiza reaktivne snage za nelinearna
R - Karadeniz Teknik Üniversitesi
11.10.2016 Dear friends, The first hearing of the case
İhtiyaç Listesi - Van Halk Sağlığı Müdürlüğü
Volume 2, Year 1, July 2011
yazı işleri birimi - Öğrenci İşleri Daire Başkanlığı
Dr. Emre BİÇER - Kimya Bölümü
buradan - Elektrik-Elektronik Mühendisliği Bölümü
R - Karadeniz Teknik Üniversitesi
Otvori - Loctite
mega mühendislik otomasyon elektrik