Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
VZOROVÉ PŘÍKLADY SRP/CS OBVODŮ
Wyznaczanie uzyskanego poziomu bezpieczeństwa PL dla funkcji
Solivia 2.5 manual
Výroční zpráva za rok 2010 - ATAS elektromotory Náchod as
Wyłącznik linkowy zatrzymania awaryjnego ZS 71 2Ö/1S
Zemlja odredista Nemacka – informator
Işık Bariyeri Kontrol Ünitesi LG5925/900
4.10.5- Kultura bydlení a odívání
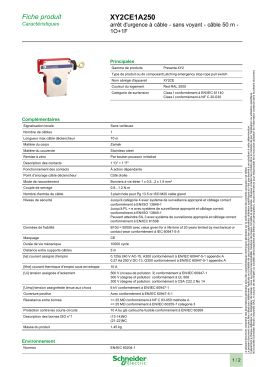
XY2CE1A250
Bezpečnostní list_ERGELIT_26 03 2014 - HERMES
Hromosvody a uzemnění, spínací technika
Stáhnout soubor ve formátu PDF
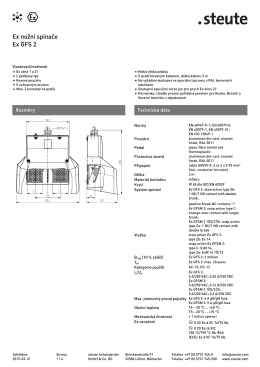
Náhled tisku (PDF) - steute Schaltgeräte
Máme pro Vás řešení
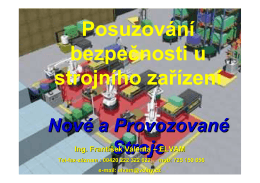
Bezpečnost strojních zařízení
Návod k použití bezpečnostního spínače CES-AR-C01-AH-SA
Stáhněte si č. 25 v PDF - Česká společnost pro údržbu
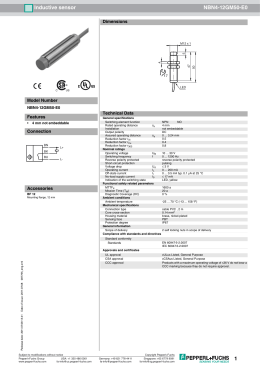
Technical Data Sheet
promocja zdrowia - Polski Przegląd Nauk o Zdrowiu
Návrh železobetonových konstrukcí podle Eurokódu
Školní vzdělávací program - ŠKODA AUTO as, Střední odborné
3. třída podle Hejného
Karta katalogowa