Read
Gur
☰
Explore Categories
Sign in
Sign up
Upload
×
Download
No category
Fizika - Departman za fiziku
Fizika - Departman za fiziku
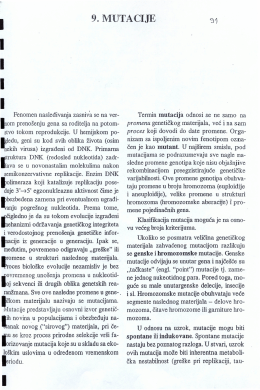
06 Mutacije - WordPress.com
Tek Katlı Betonarme Sanayi Yapıları İçin Hızlı Hasar Hesaplama
TEORIJSKA MEHANIKA Lagranzeva i Hamiltonova mehanika
Polarizacija u električnom polju - Departman za fiziku
Fizika - Fakulteti
Predavanje br.1
indir
EKSKRETORNI SISTEM
ULTRAZVUK AUTORI: MENTOR:
VÝSLEDKY, RIEŠENIA, NÁVODY 1 MECHANIKA α α
III/2010 Mimořádné číslo - Výzkumný ústav vodohospodářský T. G.