Read
Gur
☰
Explore Categories
Sign in
Sign up
Upload
×
Download
No category
Fizika - Departman za fiziku
Fizika - Departman za fiziku
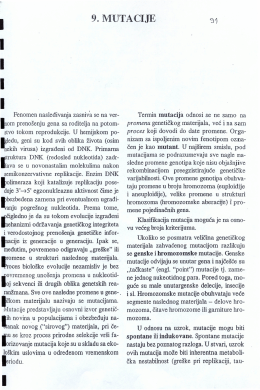
06 Mutacije - WordPress.com
Izvještaj STK C4 (pdf)
MAŠINA ZA SEČENJE POLYKEN TRAKE TIP SM 2.11
Tajna Slobodne Energije Klatna
ULTRAZVUK AUTORI: MENTOR:
Polarizacija u električnom polju - Departman za fiziku
2.1 Kinematika
Fizika - Fakulteti
indir
Skupenství látek
VÝSLEDKY, RIEŠENIA, NÁVODY 1 MECHANIKA α α