Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
PICAXE – mikrokontrolér pro začátečníky a snadné
PICAXE – procesor pro neprogramátory
COUNT pin, period, variable
Honeywell Témata magisterských prací 2014/2015 (Brno)
PICAXE - začínáme
Telco PH-895ID CZ
GC3DENE Rozpuštěný a vypuštěný
RUN slot - picaxe.cz
Raspberry Pi
Priprema_za_lab_2 NOVO.pdf
Programiranje uz crtanje
KATALOG A4 (format
Nabíječky EXIDE
AxeMotor10 - Hobbyrobot
readtemp - Hobbyrobot
ARDUINO – příručka programátora
serin - picaxe.cz
pullup - Hobbyrobot
hi2csetup - picaxe.cz
adcsetup - picaxe.cz
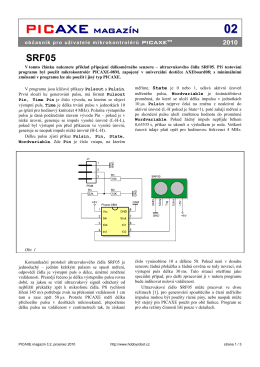
PXM 02/2010 - Hobbyrobot
Robotický vysavač Série 600
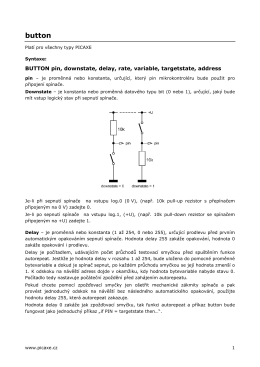
button - Hobbyrobot