Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
PXM 02/2010 - Hobbyrobot
COUNT pin, period, variable
5. Počítačové sítě
Ředitel školy stanovil tato kritéria hodnocení uchazečů v přijímacím
AxeMotor10 - Hobbyrobot
PICAXE - začínáme
Kolik si dávat stranou, aby...?
hi2csetup - picaxe.cz
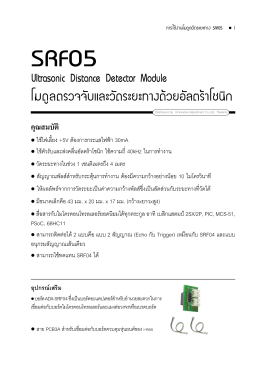
Ultrasonic Distance Detector Module โมดูลตรวจจับและวัดระยะทางด วย
pullup - Hobbyrobot
PICAXE – mikrokontrolér pro začátečníky a snadné
PICAXE – procesor pro neprogramátory
button - Hobbyrobot
Návod - Miloš Zajíc
a KARTOGRAFICKÝ GEODETICKÝ - Český úřad zeměměřický a
souprava - ŠKODA Vagonka
jak_na_prezentace.pdf
Manuál T-serie - TITTL THERMO KING, sro
Video na webu – jak spustit a na co si dát pozor +
2.kolo Atletickej ligy 2016
Nepřímé měření délek
Technická informace - ŠKODA VAGONKA a.s.
ARDUINO – příručka programátora