Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
PICAXE – procesor pro neprogramátory
CENíKWAYlN 2014 (celolamino)
6riatilm
PICAXE – mikrokontrolér pro začátečníky a snadné
COUNT pin, period, variable
Télécharger (PDF 267ko)
RUN slot - picaxe.cz
hibernate - picaxe.cz
PICAXE - začínáme
Programiranje uz crtanje
Proč se budeme učit programovat právě v Delphi
AxeMotor10 - Hobbyrobot
Návod Robomow modely RL
Manuál T-serie - TITTL THERMO KING, sro
Jasełka 2014 - Polska Szkoła przy LPCM w Sheffield
hi2csetup - picaxe.cz
adcsetup - picaxe.cz
serin - picaxe.cz
PXM 02/2010 - Hobbyrobot
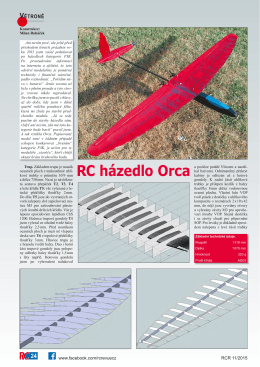
RC házedlo Orca
Testy vypracovane.pdf
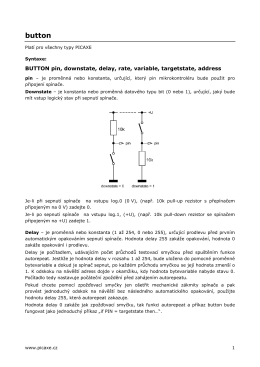
button - Hobbyrobot
Ovladač regulátorů OR1 - popis a návod k použití - jyrry