Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Priprema_za_lab_2 NOVO.pdf
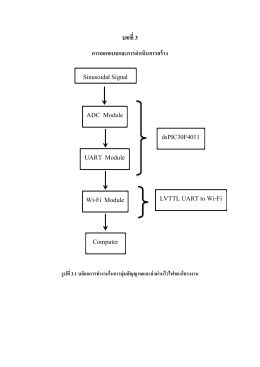
ADC Module UART Module dsPIC30F4011 Wi
Télécharger le PDF - Cfdt Interco Services Publics Parisiens
Plán práce výboru MO
Uvodni deo novog praktikuma-osnove rada sa mikrokontrolerima
Pomyłka technologiczne budowniczych katedr?
การทดลองที่5 การใช้งาน ADC วัตถุประสงค์ 1) เข้าใจก
PICAXE – mikrokontrolér pro začátečníky a snadné
การทดลองที่6 การใช้งาน Timer วัตถุประสงค์ 1) เข้าใจ
Pracovní list - fyzika 8. ročník - změny skupenství
การควบคุมมอเตอร์กระแสตรงไร้แปรงถ่านในย่านก
K - RMUTT Research Repository:คลังข้อมูลงานวิจัย
Ćwiczenie3
WiSeN SENSÖR DÜĞÜMÜ
adcsetup - picaxe.cz
výkonná řešení pro správu dokumentů
Pracovní list - fyzika 8. ročník - změny skupenství
Vyhodnotenie pripomienkového konania
readadc - Hobbyrobot
Kody działu
calibadc - picaxe.cz
power under professional control
Serdecznie zapraszamy chętnych do udziału w konferencjach, które