Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
AxeMotor10 - Hobbyrobot
zde
Raj typ 451 - TT
LUBELSKA PRÓBA PRZED MATURĄ 2015 – poziom podstawowy 1
SOUTĚŽ O NEJLEPŠÍ URBANISTICKÝ PROJEKT / Karel Maier
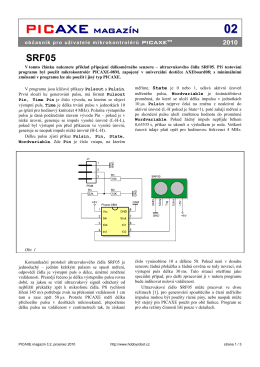
PXM 02/2010 - Hobbyrobot
Fyzika - metodická příručka
ECE 492 SENIOR PROJECT I MINI SUMO ROBOT
PICAXE – mikrokontrolér pro začátečníky a snadné
PICAXE – procesor pro neprogramátory
MALÉ SERVOMECHANISMY PRO ROBOTIKU A MECHATRONIKU
PICAXE - začínáme
RUN slot - picaxe.cz
ARDUINO – příručka programátora
hibernate - picaxe.cz
Problematika merania prepäťových ochrán z pohľadu - SEZ-KES
COUNT pin, period, variable
CSI dynamická tuhosť
Z okazji 30-lecia firmy AUDIOPOL oferujemy super promocyjne ceny
hi2csetup - picaxe.cz
Dokumentace k robotovy RX1
PWM pin, duty, cycles
การสื่อสารแบบอนุกรม Serial Communication