Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Rešenja drugi deo
Technical Documentation
Elektrotechnika i elektronika-07-i
Fiche Pédagogique (choix des options)
LISTE DES MANUELS et FOURNITURES de SECONDE 2016-2017
ex2_chapitre1 - SCIENCES ÉCONOMIQUES ET SOCIALES
Električne mašine Zadaci za rad na časovima računskih
Synopse příspěvku - Wichterlovo gymnázium, Ostrava
Genealogia Polska
kliknij aby pobrać instrukcję (plik pdf)
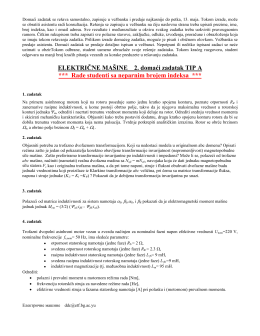
ELEKTRIČNE MAŠINE 2. domaći zadatak TIP A *** Rade
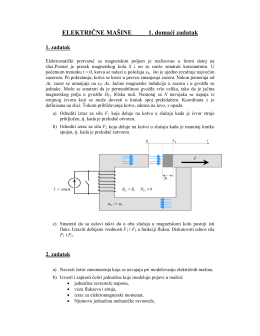
ELEKTRIČNE MAŠINE 1. domaći zadatak
t - Elektrotehnički fakultet Istočno Sarajevo
2. testovi-naizmenične struje
m - Slobodan N. Vukosavic
Asinhrone masine
Preuzmite katalog
testovi-elektromagnetizam
1. elektroenergetika
06_Vektorsko REP.Rev1.pdf
Jméno autora Mgr. Jiří Kozák Datum vytvoření Listopad 2011 Ročník
5 Teresa ORLOWSKA-KO.. - Instytut Maszyn, Napędów i Pomiarów
Controlling zasob