Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
06_Vektorsko REP.Rev1.pdf
PAJES - Pamukkale University Journal of
U V O D - Slobodan N. Vukosavic
M - Elektrotehnički fakultet
PLURATO BOOM - AgroKlub.com
Rešenja drugi deo
RASHLADNI URE AJI I TOPLOTNE PUMPE MAŠINE ZA HLA ENJE
Medicina prospekt
null
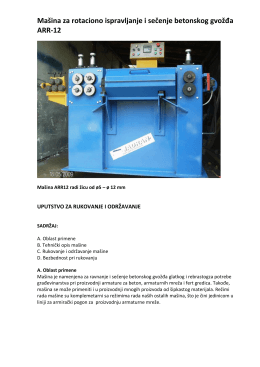
Mašina za rotaciono ispravljanje i sečenje betonskog gvožđa ARR-12
File - Hidromasazne kade i bazeni za kucnu i
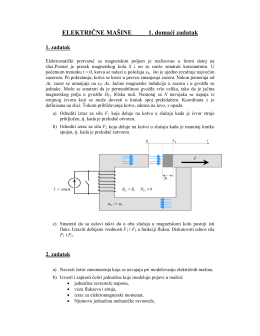
ELEKTRIČNE MAŠINE 1. domaći zadatak
Šta su Harmonici?
Kvalitet se nasleđuje!
TEs
1. รายการบรรณานุกรม 1.1Name (Author Name or Corporate name
PDF
Temat: Pierwsze kroki Matlabie. Podstawowe operacje macierzowe i
Prospekt PPRP-1 - Kvazar Beograd
satnica doktorskog studija za ljetni semestar ak. god. 2015 - FER-a
Moduly skříněk