Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
M - Elektrotehnički fakultet
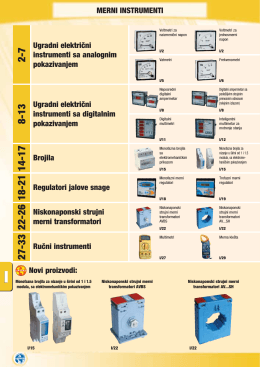
MERNI INSTRUMENTI Regulatori jalove snage
Zadaci za domaći rad
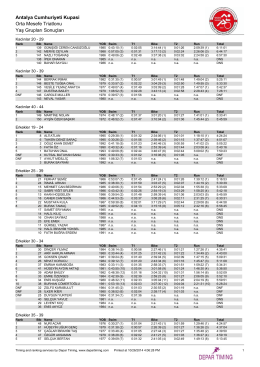
Yaş Grupları - Depar Timing
Frekventni regulatori-prednosti korišćenja (SRB)
Bez merenja nema menadžmenta... Tango!3D – merni
ESERLER - KTÜ Elektrik-Elektronik Mühendisliği
Energetska efikasnost teh.procesa-158989
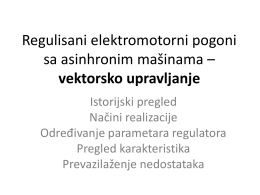
ATV312 Kullanım Kılavuzu
06_Vektorsko REP.Rev1.pdf
Količina svežeg vazduha
Vazduhoplovni propisi
Dopunski rad - 23.5