Read
Gur
☰
Explore Categories
Sign in
Sign up
Upload
×
Download
No category
TOK 2009 ÖZEL OTURUMLAR
sempozyumu - Türkiye Halk Sağlığı Kurumu
Program (Genel Bakış) - (ToRK)
30-23 07 2014 gündem - İktisadi ve İdari Bilimler Fakültesi
Finansal Sektörde Risk Yönetimi
etkinlik programı - Europort
etkinlik programı - Europort
10 EYLÜL 2015 PERŞEMBE K AHVE M OLASI (Stampa
ROBOTIC SHOW & FORUM WIN Eurasia Metalworking Fair 11
1. uluslararası ileri endüstriyel otomasyon kongre ve sergisi
ÖZGEÇMİŞ - Sabancı Üniversitesi
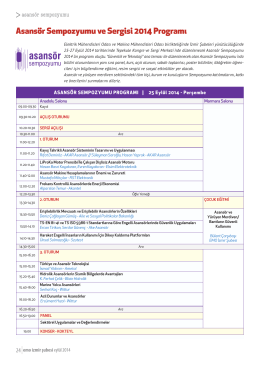
Asansör Sempozyumu ve Sergisi 2014 Programı
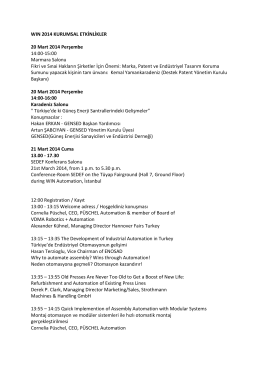
WIN 2014 KURUMSAL ETKİNLİKLER