Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
ÖZGEÇMİŞ - Sabancı Üniversitesi
03.06.2014 - Marmara Üniversitesi
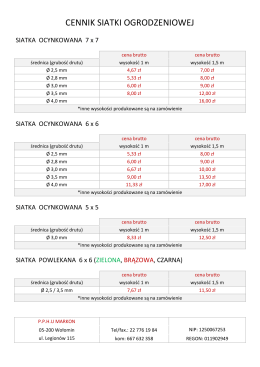
Siatka Ogrodzeniowa
NEPRAVIDELNÝ ZPRAVODAJ č. 3/2016
Tabuľka objektívov s objímkou E
broşürü - TOK 2014 - Kocaeli Üniversitesi
Present outlook on cardiovascular diseases and statins
CURRICULUM VITAE - Katedra ekologie a životního prostředí
I. Nemzetközi Magyar Matematikaverseny
Základní příkazy v R
PREZENTÁCIA K 60. VÝROčIU ZALOžENIA KATEDRY (1953
Dosyayı İndir - TOBB Ekonomi ve Teknoloji Üniversitesi Açık Erişim
375412 ประวัติวรรณคดีญี่ปุ่น 2
Výročná správa KEM 2013
Detaylı Program - (ToRK)
İnsan Kaldırma Hareketinin Analizi için Tip−2 Bulanık
Boże dziwactwa_PDF
Doç. Dr. Cihan KARAKUZU - Bilecik Şeyh Edebali Üniversitesi
Sponsor Başvuru Dosyası - TOK 2015 Türk Otomatik Kontrol Ulusal
Prof. Dr. Zehra DURNA - İstanbul Bilim Üniversitesi
ENDÜSTRİYEL ROBOTLAR
Üye Listesi İçin Tıklayınız
ATSO STRATEJIK PLAN - Antakya Ticaret ve Sanayi Odası