Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Dört-Rotorlu Bir İnsansız Hava Aracının Geri
tanklarda sıvı seviye denetim uygulaması için pıd kontrol
CENNIK CG 2014 PLN PROMOCJA od 30.07
marmara özel sayı
s - Dumlupınar Üniversitesi
Sirküler No: 130 __ TASLAK SONUÇ RAPORU HK
FYZIK´ALNE PRAKTIKUM
Sayı 5 - WordPress.com
buraya - WordPress.com
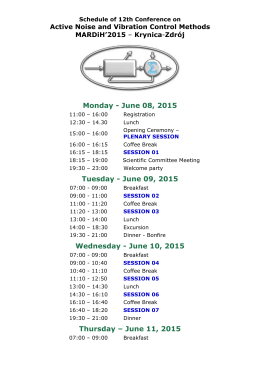
MARDiH 2015 program - 12th CONFERENCE on Active Noise and
TECHNICKÁ PRÍRUCKA
TOK 2009 ÖZEL OTURUMLAR
Otel Odası Otomasyonu
Otel Odası Otomasyonu
REACH ve CLP Haberleri
Bir Binek Araç İçin Elektrikli Engelli Rampası Geliştirilmesi
Regulator kursu statku optymalizowany algorytmem mrówkowym
Islak Rotorlu Üç Hızlı Flanşlı T p S rkülasyon Pompaları
2. kısım durum ve parametre tahmini
dört rotorlu uçan robot denge ve yönelim analizi ile uygulaması
in the Subthalamic Nucleus-Globus Pallidus Network i
Mustafa Engin Emekli Doç.Dr. Bilin Aksun Güvenç Desing of An