Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
LPC1769 ile 8 Temel Uygulama
Imprimer la carte
Wiz550WEB_users_guide
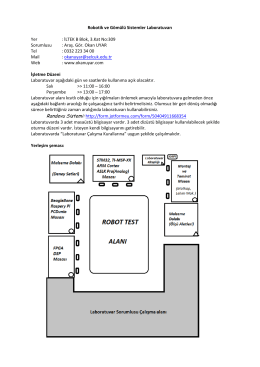
Robotik ve Gömülü Sistemler Lab.
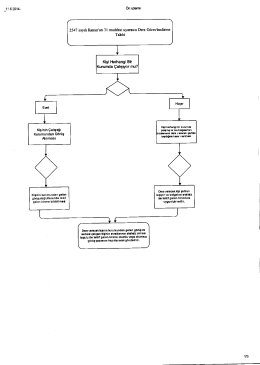
yazı işleri şube müdürlüğü iş akış şemaları
การแสดงผล (Output)
Debaty czerwiec - Lądek
A Hobbielektronika csoport bemutatója
Sve za lepši dom i spretne majstore!
ŽILINSKÁ UNIVERZITA V ŽILINE DIPLOMOVÁ PRÁCA
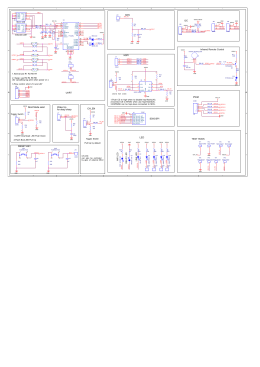
Boot Mode selet RESET KEY UART HSPI SDIO/SPI ADC
Interfejs użytkownika
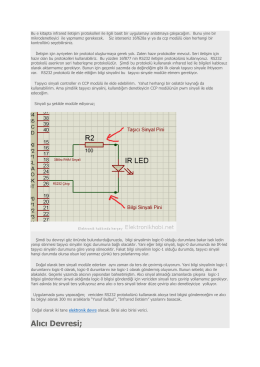
iletişim uygulaması
slidy - SUT SH
DMA, przerwania - Wydział MIM UW
Przerwania - Wydział MIM UW
IR, ADC - Wydział MIM UW
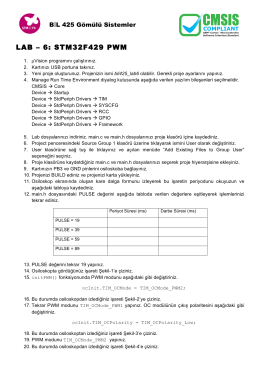
LAB – 6: STM32F429 PWM
1. Wprowadzenie 2. Mikrokontrolery STM32 3. Podstawy języka C#
endüstriyel otomasyon teknolojileri mikrodenetleyici ile lcd
Důležité informace k projektu „Stvoření“
kullanım kılavuzu
içindekiler 1 Güvenlik 2 Giriş 3 Mekanik tesisat 4