Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
endüstriyel otomasyon teknolojileri mikrodenetleyici ile lcd
LC-40LE924E LC-40LE924RU LC-40LE824E LC
tımer uygulaması - Kırıkkale Üniversitesi
PIC PROG/DEKA PRO-2 Eğitim Seti/Kartının Teknik Özellikleri Bir
iletişim uygulaması
DTR 09d - Zakład Automatyki Przemysłowej BP
R - Karadeniz Teknik Üniversitesi
Mühendislik Fakültesi bütünleme programı için tıklayınız.
1. Hafta
TEMEL ELEKTRON*K -1- - Hacettepe Üniversitesi Robot Topluluğu
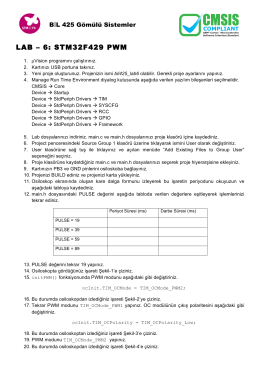
LAB – 6: STM32F429 PWM
2-Mikroişlemci mimarisi
Sakarya Üniversitesi, Teknoloji Fakültesi, Yrd.Doç.Dr
Labview Tabanlı Bir Elektronik Deney Seti Geliştirilmesi
1 CURRICULUM VITÆ SERHAT YILMAZ
Ders İçerikleri - Türk Dili Bölümü
TDV DIA - İslam Ansiklopedisi
Programování mikrokontrolérů ATmega32
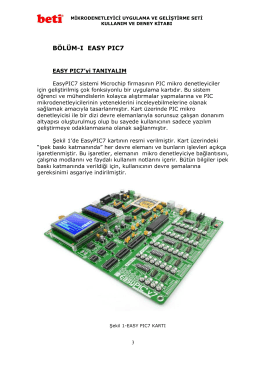
bölüm-ı easy pıc7
akü hukuk fakültesi 2015-2016 bahar dönemi final sınav programı
σ - DNEC
Çizgi İzleyen Robot Tasarımı
REAKTOR SA FLUIDIZOVANIM SLOJEM