Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
ŽILINSKÁ UNIVERZITA V ŽILINE DIPLOMOVÁ PRÁCA
PDF - e-Naukowiec
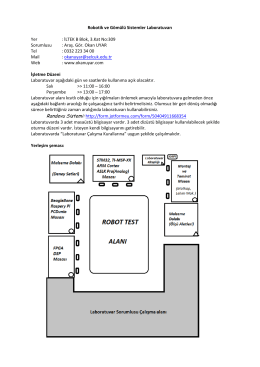
Robotik ve Gömülü Sistemler Lab.
ARM
Nové liekové formy
Debaty czerwiec - Lądek
emustudio emustudio emustudio emustudio emustudio emustudio
Procesy, meziprocesová komunikace a její synchronizace
ŽILINSKÁ UNIVERZITA V ŽILINE DIPLOMOVÁ PRÁCA
Štatistická fyzika
LPC1769 ile 8 Temel Uygulama
Ders 6
Pdf yap
1. Hafta
Okruhy na statne skusky_Bc_PTaS_aktualizovane06052013
Ali Ergün - TTL Seviye
manual DVR
zápis
MCLS-modular®
Qt et graphique - Sites personnels de TELECOM ParisTech
slajdy2010/p09.pdf - osa.dcs.elf.stuba.sk
slajdy2011/pp02hw.pdf - osa.dcs.elf.stuba.sk
Przerwania - Wydział MIM UW