Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
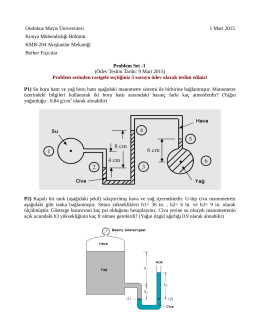
Ödev -2 : Akışkanlara Giriş (pdf, 141 kb, 1.03.2015)
(Microsoft PowerPoint - bro\376\374r)
5. HAFTA
PowerPoint Sunusu - Atikelektrik.com
Kullanım Klavuzu İndir
Adım 1 - Bosch
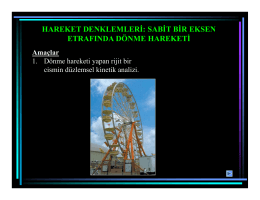
hareket denklemleri: sabit bir eksen etrafında dönme hareketi
FİZ 103C 6. hafta 1
Newton Yasalarının Uygulamaları
Katalog İndirin PDF
Manajemen Ruang Rawat _agustus_ 2016
kementerian kesehatan ri politeknik kesehatan bandung
Metrologia: miary dokładności - Centrum Inżynierii Ruchu Morskiego
5. drapaj temel beden kalıbı
MOTORLU ASTAR KESME MAKİNESİ
12. Moment Kavramı
cumhuriyet halk partisi istanbul 1.bölge milletvekili aday adayları listesi
Sysmac: Tam entegre bir platform
Uzay yolculuğu sanılandan (bir parça) daha güvenli
Perspective - Mehmet Salih Demirci
EKO162 İktisatçılar için Matematik II Dersi Final Sınavı Çözümleri