Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Cloud Robotika: vplyv cloud computingu na - Neuron
Cisco_Meraki_EU Privacy and Data Protection Compliance_SK
sieťový hudobný prehrávač pre audiofilov
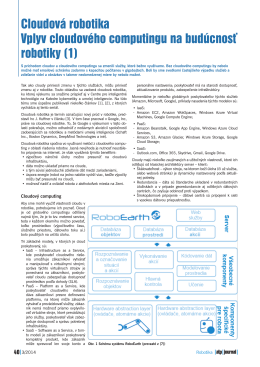
Cloudová robotika Vplyv cloudového computingu na budúcnosť
Číslo 2/2013
null
hfttf hackathon proje konuları
Zásuvné konektory pro přenos dat¦Plug connectors - Multi
Postup prechodu zo Solidu na Humanet
Katalog - Připojení radiátorů UNIFIT
Programın tamanını indirmek için tıklayınız
Zahajujeme Svetový mesiac Alzheimerovej choroby
Tapu Sicil Müdürlüklerince Düzenlenen
1 EK-1 deki “Talep Ve Bilgilendirme Formu”nu inceleyip
Prípadová štúdia Úspora nákladov pri využití cloudu
acmspy2013_submission_18
Poznámka: Príručka rýchlej inštalácie ww
Videokonference Yealink VC400 videokonferenční
Extending Python Web Services
Textová verzia - ZSISpecialna.sk
Web Camp - Košice IT Valley
TECHNICKÁ UNIVERZITA V KOŠICIACH
EPD Manual