Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
1-INF-115 Algebra 1
Lineárna algebra
Lineárna algebra
Gymnázium Ľudovíta Štúra v Trenčíne Učebné osnovy
Úvod do teórie grafov
Aplikácie teórie množín
Bc_Poziadavky na statnice
1-INF-115 Algebra 1
Krypto II - skripta-fmfi
2-UMA-115 Teória množín
Sešit 4-5/2014 / PDF - Crypto
ELEKTRICKÉ FILTRE
matematicka_analyza.pdf
Priamkové plochy
03 - Množiny a operácie s nimi
Metrički i Banachovi prostori
2-UMA-115 Teória množín
1 Úvod 3 1.1 Predhovor
2-UMA-115 Teória množín
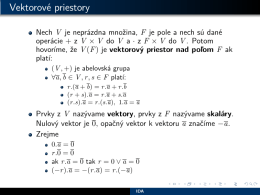
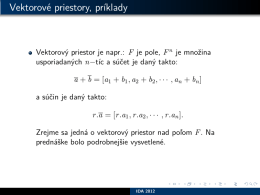
Vektorové priestory Podpriestory
LINEÁRNE PROGRAMOVANIE
Opakovaný kurz
CROSS-COMPLIANCE (Krížové plnenie) V roku 2003 bola