Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
matematicka_analyza.pdf
Parciálne derivácie funkcie dvoch premenných
Vybrané kapitoly z kvantovej fyziky
Stupeň zobrazení
n - Katedra matematiky FPV UKF v Nitre
KMA/MMAN1 Matematická analýza I
ACTA MATHEMATICA 13 - Katedra matematiky FPV UKF v Nitre
Gymnázium Ľudovíta Štúra v Trenčíne Učebné osnovy
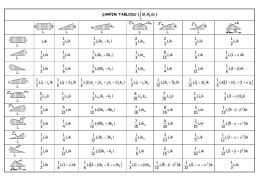
Tablolar-toplu - WordPress.com
DERIVÁCIA FUNKCIE
Poznámky k cvičeniu č. 1 - Formálne jazyky a automaty
Aplikácie teórie množín
Legislatívne predpoklady bezpečnosti informácií III.
Vypracované otázky RMA
1-INF-115 Algebra 1
Priamkové plochy
Totálny diferenciál funkcie viacerých premenných
Metrické priestory
Krivkové integrály
9 Mocninová funkcia, lineárna lomená funkcia
x, y
Služby Internetu – (Komunikácia prostredníctvom IKT)
Elementy diferenciálnej geometrie plôch