Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Mechanika-kinematika
13 !"# $%&`()*+
Zem ako vesmírne teleso.pdf
Ukládání BRO Damajková Nasobůrky
Uchwala Nr XL/439/2013 z dnia 22 listopada
KOMUNIKAČNÉ ZARIADENIA A OPATRENIA
Justyna Walczak MISS STUDENTEK 2011
MECHANIKA (STATYKA)
6 FóRum ARcHiTeKTúRy - Spolok architektov Slovenska
Teória - Mechanika hmotného bodu
2014-2015 B Malzeme 1 dersi 6.hafta _internete_
Prednáška 2: Diferenciálna geometria plôch
Poznámky k cvičeniu č. 1 - Formálne jazyky a automaty
3 POHYB A SILA 3.1 Rýchlosť rovnomerného pohybu
soubor ke stažení - Modularizace a modernizace studijního
8. ročník - Základná škola, Školská 56/9, Oslany
protokół z wynikami - Klub InO STOWARZYSZE
Meranie dĺžky telesa
Наслов презентације
4_ČÍSELNÉ MNOŽINY.pdf
Plán kurzu na cvičných skalách 2015
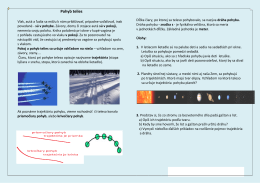
poznámky pohyb telies
Lineárna algebra