Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Prednáška 2: Diferenciálna geometria plôch
FIZIKOTERÁPIÁS CENTRUM
Termodynamika kolem nás
ReKONštRuKciA KOPilitOV
Mestečko 5.2.2014 Vec: Oznámenie o termíne a mieste
Vysvetlenie a doplnenie súťažných podkladov
Priamkové plochy
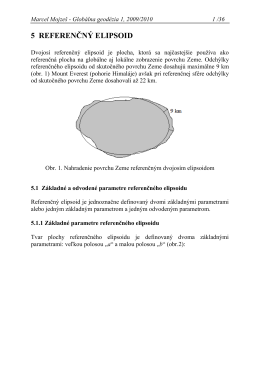
5 referenčný elipsoid
Moudra
Krivky v priestore E
Mechanika-kinematika
Ohrievače vody ARISTON
Studijní text [pdf] - Personalizace výuky prostřednictvím e
(ČSVVJ), ustavená v roce 1998, sdružuje zájemce a stimuluje teoretick
Opakovanie stredoškolskej geometrie
Text - Český úřad zeměměřický a katastrální
AKSİYAL HAVA SİRKÜLASYON FANLARI Teknik Değerler..
33_Snímače tlaku(2)
Matematický ústav AV ČR, v - MÚ AV ČR
tvrdošovský spravodaj
Pravidlá vývozu pre občanov_obce _2012.pdf
17397 - WYT VÝZVA NA PREDKLADANIE PONÚK
výpočet P, V, d, S telies pri funkciách daných parametricky



![Studijní text [pdf] - Personalizace výuky prostřednictvím e](http://s2.readgur.com/store/data/000164552_1-d4316080ac88da6d0ebe7822963943fb-260x520.png)