Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Kinematika - transformacnı matice - Ulita
sharedvision - Griffith University
PDF 514.1 kB
Kvantové zpracování informace s fotonovými páry
celá tisková zpráva
RIS-Prezentace IISSP
Vybrané numerické metody
Predikátová logika
1 Zhluková analýza 2 Vektorová kvantizácia
Zborcené plochy
Pełna specyfikacja zapytania - Spółka Wodno
Raspberry Pi v domácí automatizaci
Odometrie - Univerzita Karlova v Praze
Raspberry Pi
Triky s OpenSSH - OpenAlt
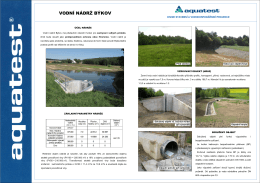
Vodní nádrž Býkov (VN_B__kov, 921,85 kB)
IPv6 – buďte připraveni
Cvicenie c. 3
ZMLUVA O DIELO Č.
SI vs. CGS jednotky
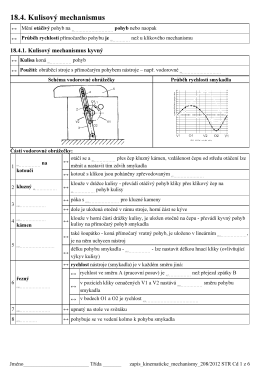
18.4. Kulisový mechanismus
dodatok č. 1 k zmluve č. 50-000055471po2012
Poskytování internetového pripojení v hromadné