Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Jún 2013 - Strojárstvo
Slovo úvodem - Povrcháři.cz
Text - Český úřad zeměměřický a katastrální
Sborník XXXVIII. Seminář ASŘ 2014 - Fakulta strojní - VŠB
Příloha č. 4_Technická specifikace.pdf
VITRALAB
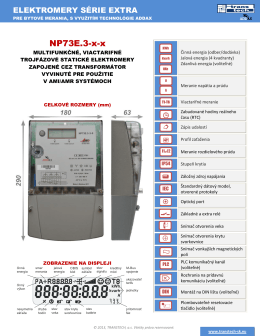
NP73E.3-x-x - TRANSTECH as
Zásobníkové ohřívače vody 2013
3D model památkově chráněného areálu
SBC420
stáhnout číslo - Sociální práce
1 Lokalita umiestnenia skanzenu - Studijní program Geodézie a
Katalog Tatramat
Malá Fermatova veta
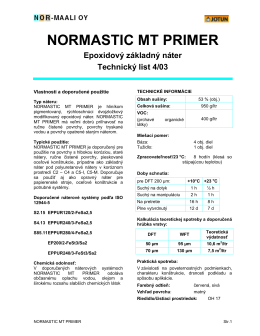
NORMASTIC MT PRIMER
r - automation.sk
Lista Finalistów