Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Dokumentace k robotovy RX1
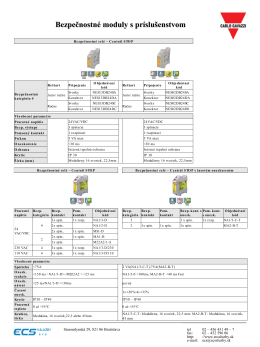
Bezpečnostné moduly s príslušenstvom
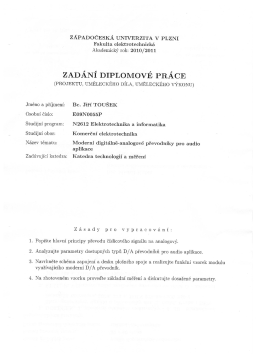
DIPLOMOVÁ PRÁCE Moderní digitálně
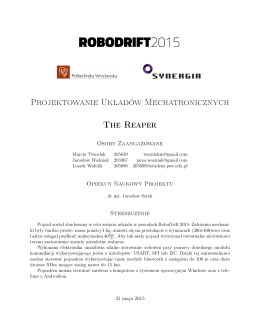
Projektowanie Układów Mechatronicznych The Reaper
Z84C15 Miniboard popis
Přístupová jednotka CL700 - ACS-line
Stáhnout - Cetelem
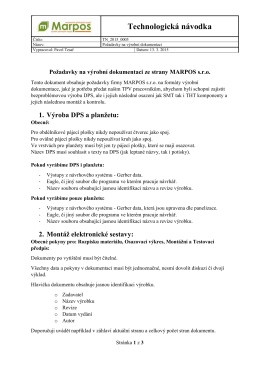
Technologická návodka
PLC – hardware – LYT - Střední průmyslová škola Zlín
4. Ders - Alper BAYRAK - Abant İzzet Baysal Üniversitesi
9. CAD systém Eagle
Metodika pro využití samostatných vzorových el. obvodů
AxeMotor10 - Hobbyrobot
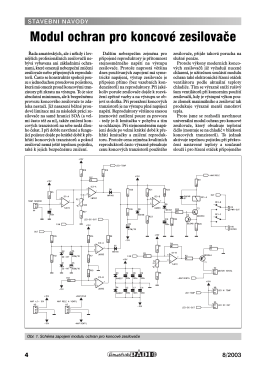
Modul ochran pro koncové zesilovače
PLC – hardware – STR - Střední průmyslová škola Zlín
PLC – hardware – ELE - Střední průmyslová škola Zlín
ECE 492 SENIOR PROJECT I MINI SUMO ROBOT
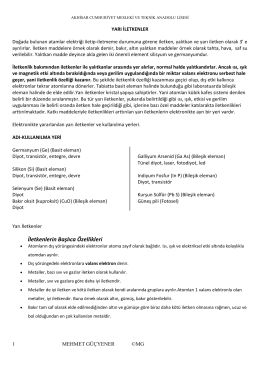
yarı ıletkenler
IDEAL STANDARD 2015 İmaj Kataloğunu indirmek için tıklayınız
Mikroprocesorová technika - Laboratórium DSP a mikroradičov
na stiahnutie - mpsvietidla.sk
www.venture.pl
Podrobný návod na pripojenie k DDNS serveru HikVision