Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
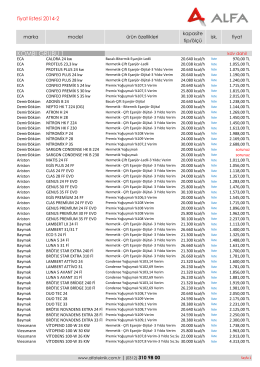
ATV312 Kullanım Kılavuzu
pdf olarak indır
atv71 asansör devreye alma kılavuzu
Schneider Elektrik Altivar32 Kullanım Katalog
Reference kompanije.pdf
Kullanım Kılavuzu (TR) - MassPro
Schneider Elektrik Altivar312 Montaj Katalog
Mayıs 2014 Sayısı için tıklayın
ESERLER - KTÜ Elektrik-Elektronik Mühendisliği
tc karşıyaka belediye başkanlığı imar ve şehircilik müdürlüğü`ne
İhale ile ilgili dosyayı indirmek için tıklayınız
HDZ SERİSİ – ANALOG PTZ DOME KAMERA
SCROLL ES100 - Scroll Otomatik Kapı Sistemleri
Ulusal ve yerel basınımızın çok değerli temsilcileri, Kıymetli
Fronius - KUKA Robotics
İsmail ULUSOY
YILDIZ - Yıldız Haber
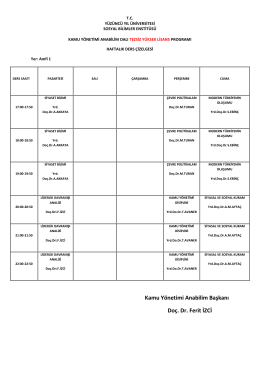
kamu yönetimi abd 2014-2015 güz dönemi ders programı
Kullanma Kılavuzu
Stáhněte si č. 26 v PDF - Česká společnost pro údržbu
M - Elektrotehnički fakultet
hdz serisi - Honeywell Security
AMAX panel 2100 - Bosch Security Systems