Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Obráběcí stroje - Katedra výrobních systémů
mechatronika – teoretická časť
Projektovanie efektívnych a spoľahlivých údržbových systémov
Obráběcí stroje - Katedra výrobních systémů
stiahnuť súbor
STATİK (1. Hafta)
İndir - Pnosis
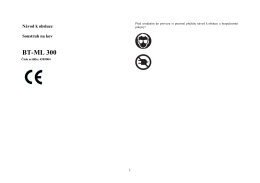
Obaly THIMM xPOSe® - inovace v prodejním regále
ıslak çevre yöntemi ile optimum çevresel akış (can suyu)
Návod k obsluze
3 Výpočet teoretické jízdní doby
pdf Ke stažení
ceník 2014-2.indd
Produktový katalog série VLC, HLC
Sedmička 19.11.2015 - ZAZ
FS Přístroj pro přesné nastavení vřetena obráběcího stroje
Výpočty při ozubení. Výroba ozubení, ukázky broušení.
PRP_10_dynamicke_namahanie
Kuličkové šrouby a matice ve stavbě CNC obráběcích strojů (seriál
8 TERMIKA A TEPELNÝ POHYB
BÖLÜM 6 - bilgisayarıma indir
PRODEJ POUŽITÝCH STROJŮ A ZAŘÍZENÍ
NT série