Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Vzájemná transformace 3D objektů reprezentovaných
Fyzikální chemie
HD projektory
Návod k obsluze
URBANISTICKÁ STUDIE TEXTILANA LIBEREC
Touha Thomase Raua změnit svět Kdo chce brát, ten musí
Lineární algebra - Marie Hojdarová.pdf
KDR 303 msp - Rojek, a.s.
Zde - FIT ČVUT
3 - Portal
null
rekonstrukcija koristeći slike sa interneta i algoritam
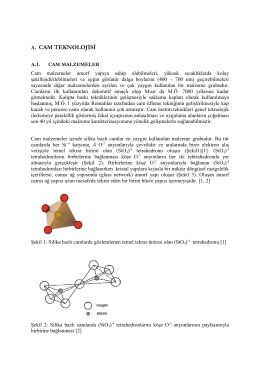
A. CAM TEKNOLOJİSİ
analýza jasových profilů při excentrické fotorefrakci
VŠB - Technická univerzita Ostrava
zde bude zadání!!!
Sborníček
Zpravodaj 2/2015
PDF Olarak İndirin
Zkouškový test z MMS(e) 19. dubna 2016 VZOR/1