Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
rekonstrukcija koristeći slike sa interneta i algoritam
Detail
3 - Portal
Tersine Mühendislik Uygulamalarında Nokta Bulutu Verilerinden
Yrd.Doç.Dr Fatih Mehmet TÜRKCÜ
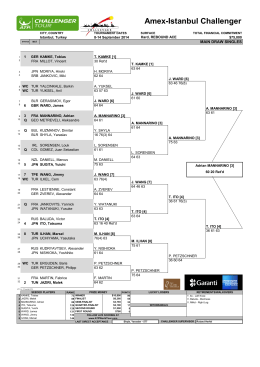
Amex-Istanbul Challenger
Preuzmite ovde - Centar za samostalni Život osoba sa invaliditetom
การตรวจหาคุณลักษณะเด่นด้วยวิธี SIFT สําหรับใบสมุนไพรพื้นบ้าน
Informacja o wynikach postępowania
oferta szkoleń dla nauczycieli i pedagogów przedszkolnych
Vzájemná transformace 3D objektů reprezentovaných
Więcej szczegółów
analýza jasových profilů při excentrické fotorefrakci
Name Organization Country Zsuzsanna Szabó Katalin Zsuzsanna
Full text
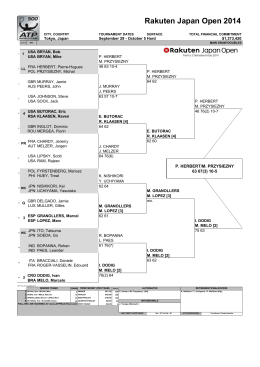
Rakuten Japan Open 2014
Czemu kolejka ta stoi?
Upute za uporabu
MANUFACTURING TECHNOLOGY
Fragment w pdf - Wydawnictwo Nowik
kma / apg 1 – aplikacegeometrie 1 v akademickém roce 2015/2016
Więcej informacji.
Page 1 NAJTANIEJ VV SIECI /м/ЯЯ/ Mii/Н ATHLETIC MAss