Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Pokyny pro použití SOLID STATE RELÉ
1 PRAVIDLAATLETIKY Pravidla IAAF ve znění příručky Competition
5 najčastejších problémov vo verejnom obstarávaní a ich
tepelná čerpadla vzduch-voda země - voda voda-voda
HOTJET katalog 2014.pdf
Manuál - Victron Energy
PŮVODNÍ NÁVOD K POUŽITÍ A OBSLUZE VÝROBEK
Technické informace LED Drivery
ADOREG - návod na obsluhu
Bosch novinka - az
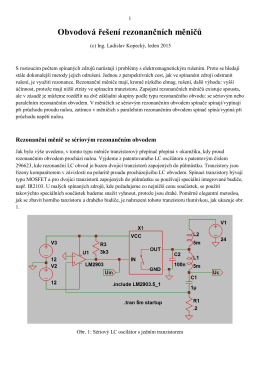
Obvodová řešení rezonančních měničů
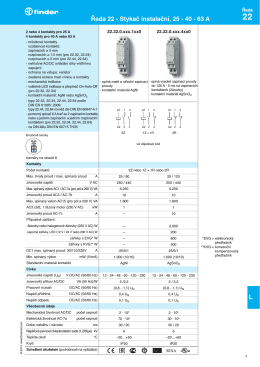
Řada 22 - Stykač instalační, 25 - 40 - 63 A
Bulletin 1/2011 - Česká společnost pro mechaniku
Všeobecné obchodní podmínky dodávky elektřiny
DOCOMATIC 600 DOCOMATIC 800
Capability Brochure - Crompton Instruments
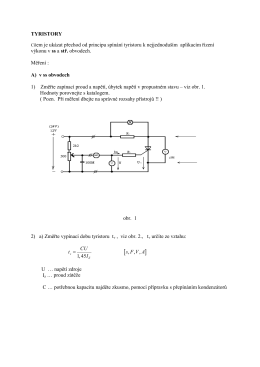
TYRISTORY Cílem je ukázat přechod od principu spínání tyristoru k
BEMS - Nelumbo Energy as
Dokument s podrobnějšími informacemi.
Zoznam objednávok za rok 2013
bezdrátový mikro spínač Renkforce
The Electric Properties of Cured Mica
NÁVOD PRO USMG ori