Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Koordinace řízení.pdf
kolejová doprava - Časopis stavebnictví
ŽIVÝ KRAJ - Regionální konference cestovního ruchu 2015
Přehled uzavírek plánovaných v roce 2015
Doplňkové pojistné podmínky pro škodové
KTX-H100 - Web
440801 Plzenˇ-Žatec-Most-Teplice
Ceník - Alpina
Ceník - Auto Palace Group
Všeobecné podmínky oprav společnosti NH Car, sro (dále jen „VPO“)
duben 2011, 8 stran (PDF, 2 MB) - Plzeň 1
Zápis č. 66 ze dne 05.03. 2015
Radost z koupele na nejmenším prostoru 16 variant
únor 2013 - Farní charita Litomyšl
instalace operačního systému a jeho konfigurace i
2013-01 - COLAS CZ, a.s.
únor 2012 - Městský obvod Plzeň 3
Citroën Magazín - Auto Mrkvička s.r.o.
Tři vánoční povídky
Popis změn k 15.6.2014
B27
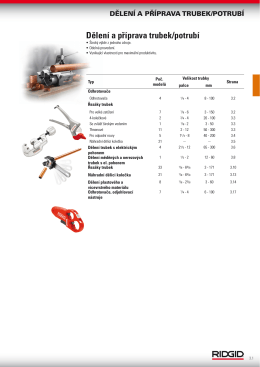
Dělení a příprava trubek/potrubí
leden-březen