Read
Gur
☰
Explore Categories
Sign in
Sign up
Upload
×
Download
No category
File
Instalacija hardvera i softvera
File
MIHAILO PETROVI´C ALAS
Предавања из Елементарне геометрије
02Analitik Geometri-Arslan
doğrusal.1 - www.omersencar.com
Predstavljanje matematičkog sadržaja na Internetu
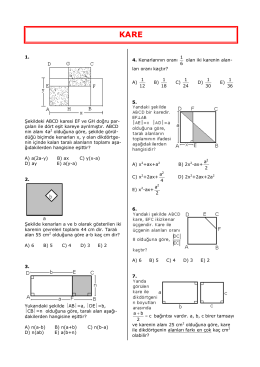
A A A A A A LYS-1 MATEMATİK TESTİ - İzmir İl Milli Eğitim Müdürlüğü
1. Şekildeki ABCD karesi EF ve GH doğru par
Tepelné čerpadlo Daikin Altherma Hybrid