Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
KONVEKSNO PROGRAMIRANJE 1
konveksna analiza 1
KONVEKSNA OPTIMIZACIJA (zadaci) Milan Jovanovic 1
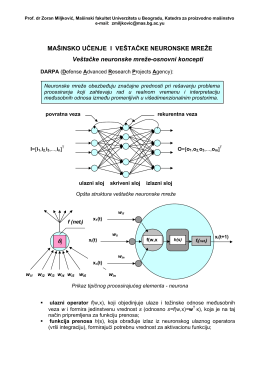
Машинско учење и вештачке неуронске мреже
V. Jihovýchodní Asie
thesis PDF (in Serbian) - Theoretical Physics at University
Mreža Žena Kosova - Kosova Women`s Network
INTELIGENTNI SISTEMI Sadržaj izlaganja
Geogebra zadaci PDS Tuzla 2012.
Квадратни трином
Analiza LVN kola u prostoru stanja
1 Binomni obrazac
Predavanja iz Lineara algebra 2, 2014
8. fanerofyty (phanerophyta) P — dreviny (kry alebo stromy), ktorych