Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Analiza LVN kola u prostoru stanja
Nowotwory o nieznanym umiejscowieniu pierwotnym
SD30S je trofazni prekidački modul na
Квадратни трином
Predavanje - Bakterijske infekcije kože
Predavanja iz Lineara algebra 2, 2014
Predavanja iz Lineara algebra 2, 2014
Untitled - cvs architects
v - Kızıltepe İlçe Milli Eğitim Müdürlüğü
Sınıfların ders programları
Дирихлеов принцип
Предавања из Основа математике
Viša matematika I /funkcije jedne promenljive za tehničke i
KONVEKSNO PROGRAMIRANJE 1
Internaupotreba - Fakultet elektrotehnike
Geogebra zadaci PDS Tuzla 2012.
1 Binomni obrazac
SISTEMI NELINEARNIH JEDNACINA
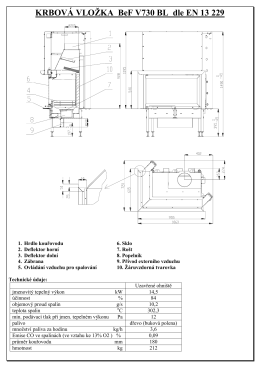
KRBOVÁ VLOŽKA BLANZEK 600 DIN 18895
VŠEOBECNÉ AMBULANCIE