Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Lag i PI kompenzator
Plan pracy – Kinga Wilk
Program spotkania
Wątpić, wątpienie… - Wydział Artes Liberales
Karakteristike
alternatif akım devreleri
09 Digitalna amplitudska modulacija
Pomična merila Pomična merila Pomična merila
SEZNAM delegacije
PT - SMEITS
VTŠ: Digitalna elektronika Logička kola na bazi bipolarnih tranzistora
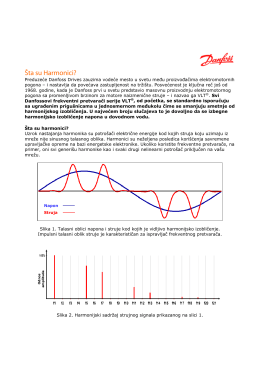
Šta su Harmonici?
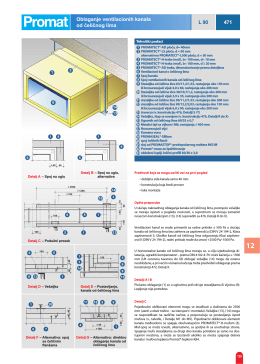
Oblaganje ventilacionih kanala od čeličnog lima L 90 471
PROcESINg `13
NUMERIČKE METODE U FIZICI smer: Fizika i informatika (F
Odluka o dopuštenom postotku preraspodjele rashoda na stavkama