Read
Gur
☰
Explore Categories
Sign in
Sign up
Upload
×
Download
No category
aktivni filtri
Indeks pojmova
Glava 1 UVOD
x - halapa.com
U V O D - Slobodan N. Vukosavic
Glava 1 Elementi elektriˇcnih kola
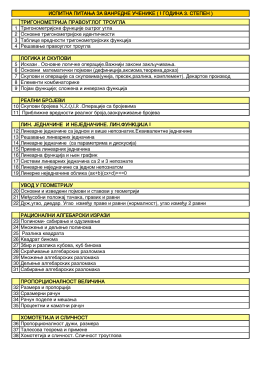
TRIGONOMETRIJA PRAVOUGLOG TROUGLA 1 Trigonometrijske
Škola života
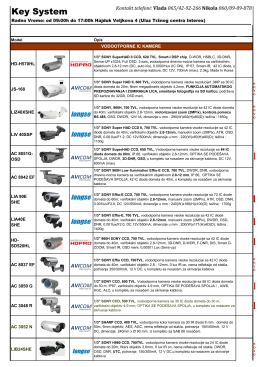
Oprema za video nadzor (PDF Katalog)
Gradivni blokovi aktivnih filtara
Elektronski sistem za analizu polifaznih opterećenja baziran
Regulamin Wyborów Miss i Mistera Politechniki Warszawskiej 201.1
Zde - zpravy