Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Aleksandar Vuletic - 354
gis sistemi
Akreditasyon Sertifikası Eki (Sayfa 1/6) Akreditasyon Kapsamı
Helix Wellness PDF
Diplomski rad
A Branch-and-Price Algorithm for the Robust
- Bel Medic
Astrološki pojmovi
Wykaz wydanych zezwoleń na prowadzenie działalności w zakresie
Kadına Yönelik Aile İçi Şiddetle Baş Etme
UVOD U GEOGRAFSKE INFORMACIONE SISTEME
Praca dyplomowa
Wprowadzenie - SP-DMR
Preuzmite prezentaciju Nec Thermo GEAR G30 Fajl je
REGULAMIN PRZETARGU PISEMNEGO NA SPRZEDAŻ
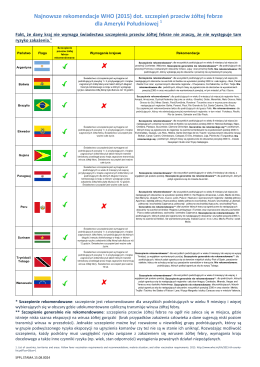
Najnowsze rekomendacje WHO (2015) dot. szczepień przeciw żółtej
MODY2 - Türkiye Aile Hekimliği Dergisi
élelmiszerüzlet kiadó. - Hódmezővásárhelyi
Hľadanie príčin autizmu.pdf
Vazduhoplovni propisi
PipeLine
Ivica Ančić - FSB - Sveučilište u Zagrebu
Slayt 1