Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Deo1
1. elektroenergetika
"Press" o Firmi Deks
ElMech5 - Aktuatorska elektronika.pdf
Poglavlje 01
2007. - ppdivut
PDF
FFA5M1 X FFA5E1 XS FFA9M1 XS FFA9E1 XS
Elektromagnetické pole, vlny a vedení (A2B17EPV) – PŘEDNÁŠKY
IZVEŠTAJ O KANDIDATIMA ZA IZBOR U STRUČNO ZVANJE - RT-RK
m - Slobodan N. Vukosavic
Tehnička dokumentacija laboratorijske postavke
ELEKTRIČNE MAŠINE 2. domaći zadatak TIP A *** Rade
m - Slobodan N. Vukosavic
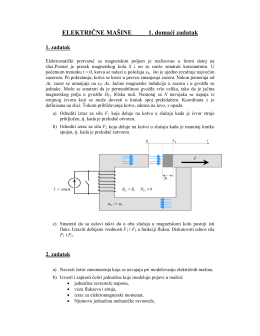
ELEKTRIČNE MAŠINE 1. domaći zadatak
Prezentacija sinhrone masine