Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
İndir (PDF, 12.74MB)
RobotOkulu e-Dergisi Sayı 12
ÖĞRENME - bilimkaynak.com
ProNest 2015 - Hypertherm
Ders 8 - Oracle NoSQL Veritabanına Genel Bakış
a>2 - Sakarya Üniversitesi
document
Verilog ve ISE Sunum
CME322 Automata Theory
Sakarya Üniversitesi, Teknoloji Fakültesi, Yrd.Doç.Dr
Kullanım Klavuzu İndir
1/6 KULLANMA TALİMATI ENFEXİA 750 mg IM enjeksiyonluk toz
BİL 321- Mantık Devreleri Tasarımı 2. Ara Sınavı
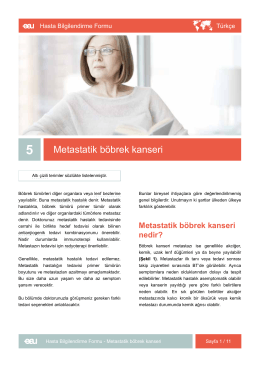
Metastatik böbrek kanseri - EAU Patient Information
şeytan tepesi ithalatçı
neler öğrendim sınavları 21
bmm-300 rf veri toplama ünitesi bmm-300 rf data collector
2014 -2015 öğretim yılı özel ışıkkent anadolu lisesi
Mac mini (Late 2014) - Support
Pamięć dzielona i kolejki komunikatów
Hafta2
2.3 operatörler - Ahmet Cansever
1 YÖNETİM KURULU FAALİYET RAPORU