Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
araç köprü etkileşiminin yolcu konforu üzerine etkisinin
47-0008
tek merkezli kent arsa fiyat-belirleme davranışsal modeli
551 KB
Nisan Ayı Gece Gözlemi
KOMPANSATÖRLER
2220 KB - Makina Mühendisleri Odası
Examine Of Pı – Fuzzy Logic Type Control Method Achievement İn
Yaylı Çalgılar - Hacettepe Üniversitesi Güzel Sanatlar Enstitüsü
15 ISEOS PROCEEDINGS BOOK
Özgeçmiş Dosyası İçin Tıklayınız - Elektrik
kırıs donatı problemý 3-ödev
2013 Yılı İdare Faaliyet Raporu
ÜNİTE
s z é l e s v á l a s z t é k b a n
BUNĚČNÝ CYKLUS II: BLÍŽÍME SE ROZLUŠTĚNÍ GENETICKÉHO
1 haftalık konular ve ilgili ön hazırlık sayfaları
MUSTAFA KEMAL BALKİ - Sinop Üniversitesi
Vocabulary of quantum mechanics
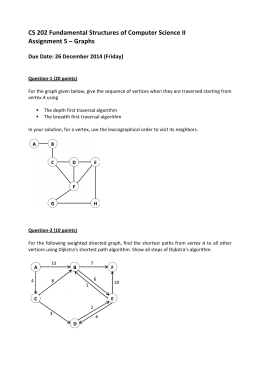
CS 202 Fundamental Structures of Computer Science II Assignment
CV İçin Tıklayınız. - Sinop Üniversitesi
Simplified vibratory characterization of alluvial basins
Regresyon ve İnterpolasyon