Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
hafif elektrikli araçlarda sürekli değişken oranlı şanzıman
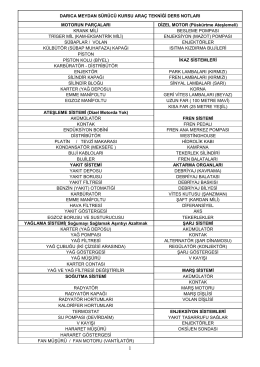
Araç Tekniği Ders Notu
Andezitik kayaçların dayanım özelliklerine içyapının
Hiperakut Miyokard İnfarktüsünde Semptom Algısı
Tarımsal Üretimde Doğrudan Enerji Kullanımı
Samsun`da Haluk Tanrüzgarı
Kuvvet-Ağırlık-Ve-Basınç
Mart 2014 - hoss ajans
Dyorum Ocak 2014
Broşür için tıklayınız - Türkiye Barolar Birliği
radar soğurabilen kompozitler için cam elyafların ince film kaplamaları
30.09.2015 Ara Dönem Faaliyet Raporu
2. uluslararası yüzey işlemleri sempozyumu • 2014
M{ZD{ CX-3
KAMPÜS Gazetesi - Çanakkale Onsekiz Mart Üniversitesi
SR EK-1 STANDART İLAN FORMU VE BAŞVURU
Alberta`da Eğitim - Study in Alberta
Elektrické bicykle Felt
Návod pohonu Bosch 2014/15
Metot etüdünde kullanılan temel diyagramlar II (pdf)
Maxx Royal Resorts`tan Maxx Royalty Card
25-27 Haziran/June 2014
Pdf - Akaju Ofis ve Eğitim Mobilyaları