Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
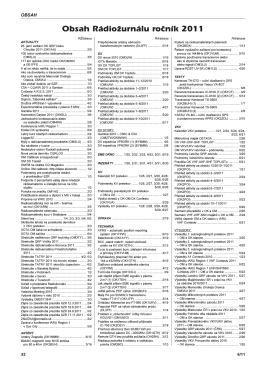
Interfejs k rotátoru cez USB port
Interfejs k rotátoru cez ethernet - inovovaná verzia
Obsah Rádiožurnálu ročník 2011
ก FF ก - Suratthani Rajabhat University
riešenia pre vašu hydraulickú ruku
Składki Członkowskie to Nasz wspólny fundusz, to środek do
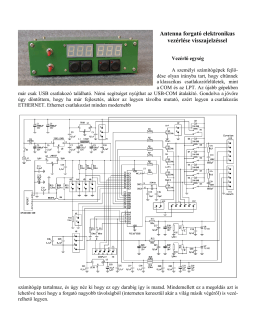
Interface az antennaforgatóhoz Ethernet porttal -új verzió
TotalCAT - OM 8 AND Ham radio page
Stavební návod: ELEKTRONICKÉ CLOVĚCE NEZLOB SE Základní
⌋ ⌉ ⌊ ⌈−
MAHMÜTBEY-PAŞADEĞİMMINÎ (İSTANBUL) CtVAM KUtMATAŞ
SML 133 Multifunkˇcní mˇericí prístroj do panelu
OM4000A - OM Power
katalóg prezentačných systémov
viac info/manuál - s
2012-2 5 Podhorsky.pdf
návod - autoalarmypresov.sk
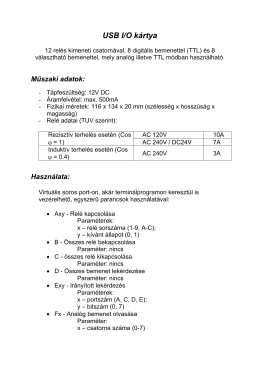
USB I/O kártya
Návod na obsluhu a údržbu HALOGÉNOVÝ - SOLIGHT E-shop
uti-atwdpdf - IMPROMAT KLIMA
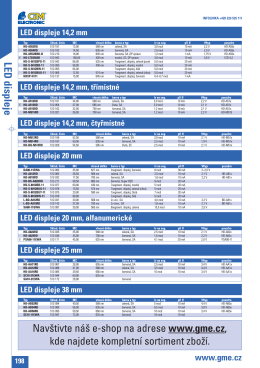
LED displeje Navštivte náš e-shop na adrese www.gme.cz, kde
Akademik Atama ve Değerlendirme Kriterleri
Frekvenčné meniče, ich využitie na pohony