Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Používatel`ská príruˇcka UR3/CB3
ŽILINSKÁ UNIVERZITA V ŽILINE DIPLOMOVÁ PRÁCA
Pobierz PDF - Universal Robots
emustudio emustudio emustudio emustudio emustudio emustudio
Návod na používanie SAMSUNG GT-C3300K
Uživatelská príruˇcka UR3/CB3
Územný plán
ˇCast` 1. Identifikácia látky/ zmesi a spoloˇcnosti
Od archívu elektronickej konferencie k znalosti databáz
null
Proceedings in Informatics and Information Technologies WIKT
Malware vtedy a dnes
metrické priestory - Katedra matematickej analýzy a numerickej
BL12 - Betonové mosty I - Ing. Radim Nečas, Ph.D.
Termoregulator-programer MR210LAW
Slovakian Code of Conduct
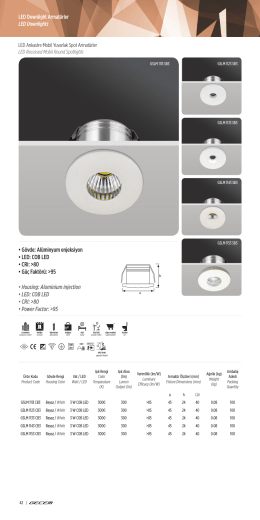
• Gövde: Alüminyum enjeksiyon • LED: COB LED
slajdy2011/pp12fs.pdf - osa.dcs.elf.stuba.sk
Špecifikácia softvérových poziadaviek
Co vie matematika povedat o šírení chrípky