Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Uživatelská príruˇcka UR3/CB3
Úvodní přednáška
Alternativní sestavy
Mluvnice soucasné ceštiny
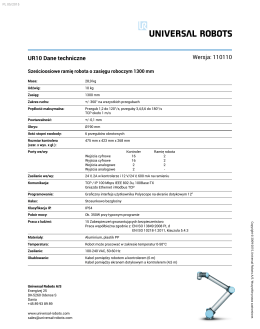
Pobierz PDF - Universal Robots
Tvorba pole sestavy
Ukázka
Katalog CITROËN C4 Cactus
Debian GNU/Linux — instalaˇcní príruˇcka
Raspberry Pi
formátu PDF - calibre User Manual
Termoregulator-programer MR210LAW
LYX – Jak na to?
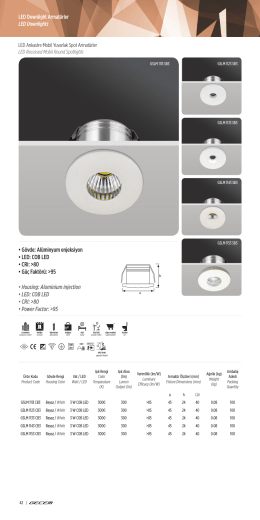
• Gövde: Alüminyum enjeksiyon • LED: COB LED
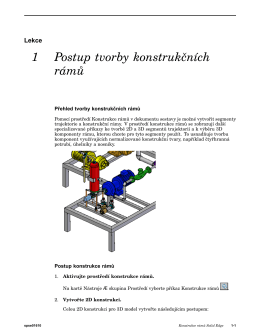
Konstrukce rámů Solid Edge
Používatel`ská príruˇcka UR3/CB3
ceník citroën ds4 black & white citroën ds4 electro shot
Konica Minolta 1300/1350 Návod k renovaci tonerových
BL12 - Betonové mosty I - Ing. Radim Nečas, Ph.D.