Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
avr kniha - Svetelektro.com
Robot reagujący na światło – „zrób to sam” (specjalnie dla wykop.pl)
4x7Szegmens Kijelző
Mikroprocesory AVR Tiny - Střední průmyslová škola Trutnov
Mikroprocesory AVR Tiny - Střední průmyslová škola Trutnov
MAŠINA ZA SEČENJE POLYKEN TRAKE TIP SM 2.11
magistrala I2C
Diplomová práce - Katedra optiky - Univerzita Palackého v Olomouci
SLOVAK ENERGY ANNUAL 2011
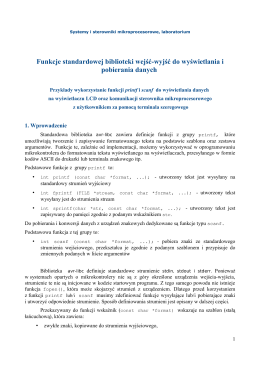
Funkcje standardowej biblioteki wejść
Návrh a konštrukcia lekárskych prístrojov
diplomová práca - KME
İlçe Milli Eğitim Müdürlüğü Yazısı - mersin
primjeri arhitektura mikrokontrolerske platforme
ZÁVĚREČNÁ ZPRÁVA
Počítadlá / časovače (T/C), časť 1.
Počítadlá / časovače (T/C), časť 1.
Žilinská univerzita v Žiline IMPLEMENTÁCIA GENERÁTORA
žilinská univerzita v žiline polohovanie elektromechanického kresla
FSK transceiver s implementáciou protokolu AX.25
Ćwiczenie4
Návrh a realizace robotického manipulátoru
Diplomová práca - Žilinská univerzita