Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Bc. Maroš Ďuríček ZABEZPEČOVACÍ SYSTÉM
L2-Akustyka i drgania mechaniczne - Katedra Budowy i Eksploatacji
Prenosové Systémy
MACSec a TrustSec
데이터 시트
komplená ponuka na stiahnutie v pdf.
Diplomová práca - Žilinská univerzita
Skriptá - návody na cvičenia - Katedra teoretickej a priemyselnej
3. Sunum
electronicnews - SOS electronic
www.mora.sk rokov
Test bezpečného použitia Rôzne verzie Presnosť pri meraní
NÁVOD NA POUŽITIE
Stropkovské - Espektrum.sk
Mobile Navigation
XVC_FT220X02A Xilinx Virtual Cable s USB obvodem FTDI
Technická dokumentácia a návod na použitie
İndir - Bilgi Elektronik
Tam Metin (PDF) - İş Ahlakı Dergisi
Rapor - orsam
Ogłoszenie o przetargu z KC
Modem Bluetooth MBL-USB/UK - uk
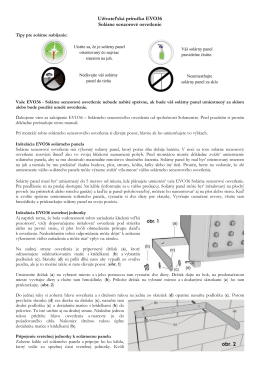
Užívateľská príručka EVO36 Solárne senzorové