Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Návrh a konštrukcia lekárskych prístrojov
2016-06-19 Informatici vyvinuli přístroj měřící ionizující
Amatérske krátkovlnové antény
tg - รับ จัด ทัวร์
PegasCompact 15
Cenník platný od 31.05.2013 kód položky Názov
cennik dakar
GEOMETRIA ANALITYCZNA W PRZESTRZENI
Prezentace aplikace PowerPoint
URAP TR 2014-2015 Türkiye Sıralaması Basın Bildirisi 12 KASIM
ELEKTRICKÉ FILTRE
súbor: hdan.pdf
Erhan ATA - Dumlupınar Üniversitesi
Základné vlastnosti polovodičových materiálov.pdf
5. Kompostovanie
Mediline Klima Santrali Kataloğu
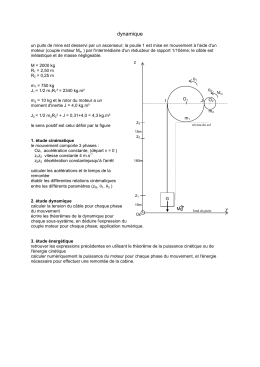
étude d`un ascenseur corrigé
Optoelektronika - Ústav fotoniky a elektroniky AV ČR, vvi
XBee Expolere Dongle Kullanım Kılavuzu Ürün Linki:http://www
Personal PDF File - Ankara Üniversitesi
Peritoneálna dialýza
Fluorescenční spektroskopie Zadání úlohy: 1) Seznamte se s
SITRANS LH100 (submersible sensor)