Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Frekvenční měnič 3G3FV
Richard Burns Rally Manual CZ.pdf
Strategický cíl v diskusi u kulatého stolu Žádané a
FU-48 / 72 / 86 / 96 série
кад је седиште херцеговачког санџака прешло из фоче у пљевља
Stáhnout Česky
Sayı: TİM.AİB.GSK.ARGE.2014/243 Antalya, 31/01/2014 Konu: Batı
Düşen Türk HavaYolları Uçağı nın Enkazı Dün Sabah Bulundu
Stáhnout Česky
Močovina technická - ACHP Slavkov, a.s.
2 *ııonoıq - mersin - mut ilçe millî eğitim müdürlüğü
Untitled
Prospekt - Austro Diesel GmbH
Návod na uvedenie do prevádzky a in taláciu š séria
AX-C705
Master Plant MP
Spoločnosti Ditec a PDFTron ohlasujú vytvorenie OEM
Contacter nous - Northern Industrial
IA 01 1124/415111f1151thliffI1l Ai-JEJ an @rITIE(Avrt7,1@6d
Simulace chodu asynchronního generátoru se spalovacím motorem
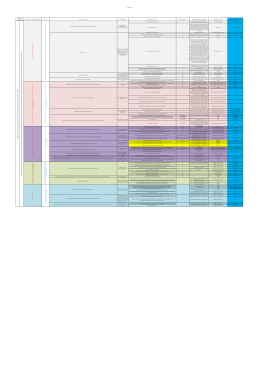
LOGICKÝ RÁMEC KLÍČOVÉ PRIORITY APSV/STRATEGICKÝ CÍL
TECHNICKA SPCIFIKACE - produktinfo.conrad.com
PR1 Jednosmerné motory